En la siguiente figura, se puede observar el sistema mínimo electrónico impermeable de partes que se utilizan para armar o fabricar el Ventilador de Emergencia VentMex.
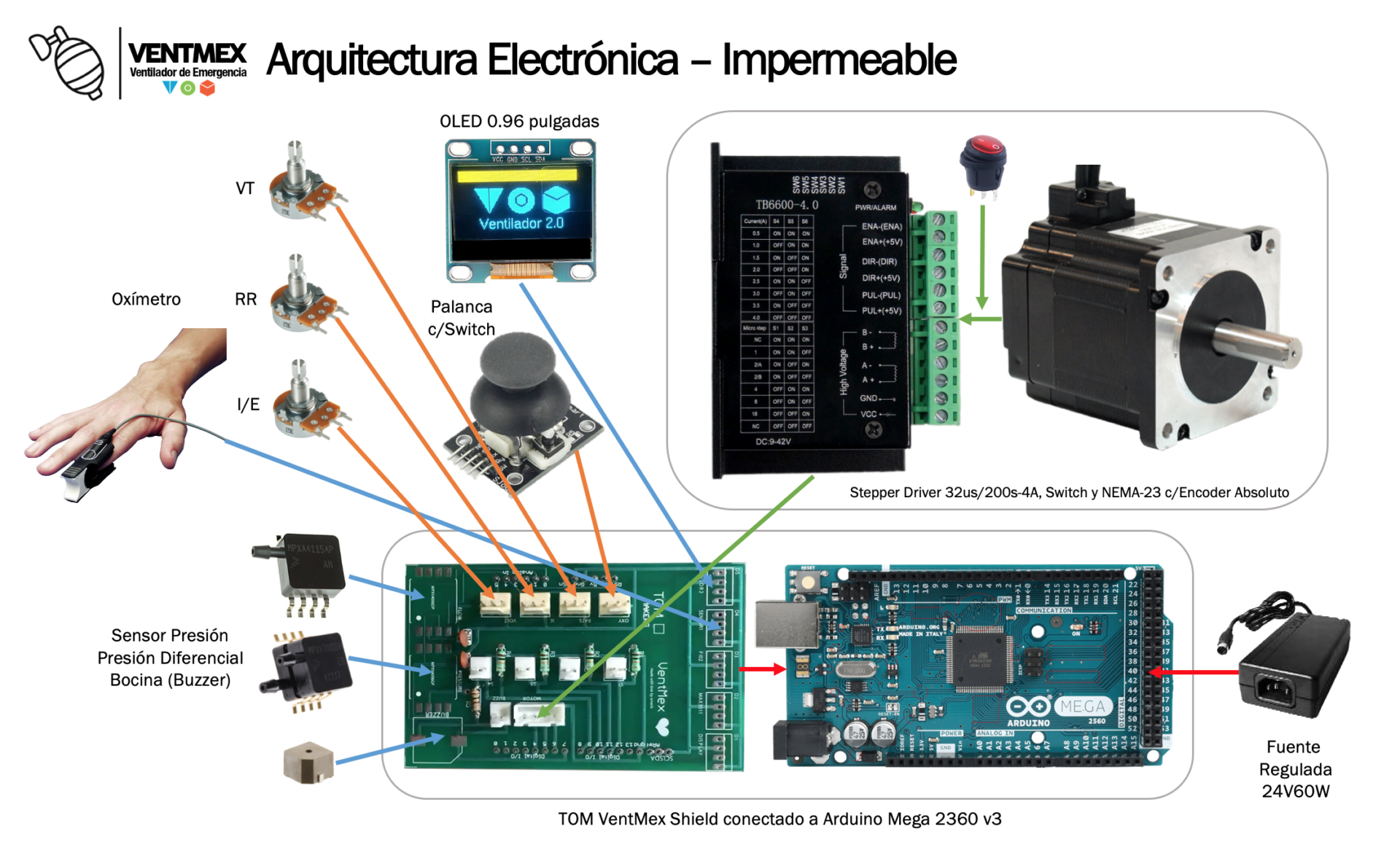
Motor de Pasos, Driver de Motor y Codificador de Posición
El sistema mecatrónico debe manejarse con un motor de pasos de alto torque, bajo un control de circuito cerrado. La exactitud para calcular pasos por volúmen, utilizamos un motor NEMA-23 de 200 pasos completos, con posibilidad de micro-stepping de 32, logrando 6,400 micropasos para controlar el motor y por ende el cilíndro que comprime el cinturón, que a su vez, comprime la bolsa AMBU. Para la medición de retroalimentación, estamos utilizando un encoder de posición absoluta para el motor de pasos y así entender, bajo cualquier momento, donde se encuentra la posición del motor . Esta es, a contrario de otros equipos que especifican sistemas cerrados de brazos o actuadores lineales, un sistema mucho más controlable y exacto al calibrar el cinturón, pasos y camello para la presión total de la bolsa. Cada equipo tiene sus razones, nosotros creemos que esta aplica perfectamente a este control.
El punto de partida para la selección del motor debe ser el cálculo de potencia basado en la fuerza necesaria para comprimir una bolsa, con el cinturón, contra la joroba del camello y la presión que el paciente expone dinámicamente. Un motor NEMA-23, con un buen driver, puede llevarnos a necesitar potencias de hasta 60W.
Fuente de Alimentación
Nominalmente, se espera que funcione una fuente de alimentación que pueda suministrar 12V y 5A o 60W (Para el cálculo de esta potencia puedes leer la Sección Mecánica). La desaceleración rápida del motor provoca picos de tensión de alimentación y debe evitarse mediante el diseño correcto del perfil de movimiento del motor, y para eso utilizamos drivers comerciales aptos para este caso de uso, como son los utilizados para maquinas CNC/Impresoras 3D o Cortadores Láser.
Una fuente de alimentación alternativa sería utilizar una batería de automóvil con un cargador de batería de automóvil de 5A conectado. Esto permitirá consumos instantáneos de energía muy altos y absorción de picos de voltaje. La batería se duplicará como una copia de seguridad de ~ 2 a 5 horas en caso de pérdida de energía del edificio.
Poder de Respaldo
Recomendamos utilizar una fuente de alimentación ininterrumpida (UPS) con un tiempo de ejecución de hasta 45 minutos. Esto incorpora de forma nativa una alarma en caso de pérdida de energía directo desde el UPS. (Hemos utilizado ISOLA BASIC, APC, Belkin y Schneider Electric sin problemas).
Driver del Motor
Intentamos varios drivers de motors comúnes (ej: con Puentes-H), derivados de los diseños iniciales, pero rápidamente sabíamos y nos dimos cuenta en pruebas, que la corriente necesaria para generar los torques y velocidades necesarios para este caso de uso, no servirían. Esto nos llevo a escoger el driver TB6600-4A, que permite controlar motores de paso, con hasta 32 micropasos por paso completo, y nos permite limitar o aumentar la corriente hasta 4A para el motor. El mismo, trae un sistema de control integrado, un disipador de calor integrado de muy buena calidad y permite correr el motor por horas sin tener problemas de precisión.
Micro-Controlador
Seleccionamos un Arduino Mega 2560 v3 como micro-controlador en este proyecto por su velocidad, memoria, y fácil expansibilidad de tarjetas que se pueden diseñar, llamadas “Arduino Shields”. Se utiliza este por tener muchos canales digitales, analógicos, bus para sensores del tipo I2C y de comunicación adicionales.
Esto nos permite incorporar más periféricos simultáneamente, como:
- Una pantalla OLED de 0.96 pulgadas.
- 2 Sensores de Presión (Normal y Diferencial para Flujo)
- Un oxímetro de pulso
- Un botón de control de emergencia de ventilador
- Una palanca tipo “Joystick” con dos potenciometros analógicos y un botón de selección de opciones
- 3 potenciómetros
- Un timbre, buzzer o bocina para alarmas auditivas y UxD
- Un pin de detección de bajo voltaje.
El Arduino es sistema de desarrollo que se utiliza porque tiene una cadena de herramientas de desarrollo libre bien establecida, un amplio soporte en línea, documentación y soporte comunitario.
En revisiones anteriores, el micro-controlador utilizado era un Arduino Uno , fácilmente disponible y fácil de programar, con un amplio soporte y documentación en línea. Proporciona 6 pines A / D (para potenciómetros y sensores de presión) y 13 pines digitales de E / S, incluidas interrupciones de hardware dedicadas (para codificadores) y pines PWM para la conducción de puentes H. Finalmente, al agregar muchos periféricos, botones y puertos de comunicación, el Uno se quedó sin pines y en su lugar se usó un Arduino Mega 250 v3. Se pueden usar otros controladores validados por la industria, y podemos implementarlos en el futuro.
VentMex Shield para Arduino Mega
Entradas
Sensores de presión y flujo : recibe un voltaje proporcional a la presión en los pulmones del paciente. Se utiliza para determinar la presión máxima alcanzada durante la inspiración y para disparar cuando el paciente intenta respirar durante el modo de asistencia de control de presión. El sensor de flujo es similar al de presión, pero diferencial con dos entradas de presión para medir el flujo. La selección del sensor de presión mínima es visual.
- Diferencial (para detectar presiones negativas)
- Rango de hasta 100 cm H2O. Este es un factor de seguridad 2x.
- La exactitud del orden de 0.5 cm H2O
El sensor de presión así como el de flujo, deben estar conectados al puerto de detección de la bolsa Ambu o en algún lugar del flujo de aire, lo más cerca posible del paciente, más allá de cualquier válvula, y protegidos por sus filtros HEPA.
Los potenciómetros de las perillas de control deben ser de una sola vuelta, 10 KΩ para tener la resolución adecuada fina. Un solo giro es permitir que ajustes específicos se marquen en la placa frontal.
VT: Varía el volumen inspirado o tidal, establece la compresión y descompresión del cinturón para con la bolsa AMBU. Durante la operación, cada paso del motor varía en 1°, 32 micropasos, y el cilíndro mecáncio de compresión se puede mover 180° que logra apretar completamente una bolsa grande o de adulto AMBU. Este potenciómetro varía la posición del 0% (completamente abierto) al 100% (completamente comprimido o casi 180 grados de la posición del cilíndro hasta home).
RR: Varía las respiraciones por minuto. Esto establece la tasa de 0 a la respiración máxima dada en el documento de conceptos.
I/E: Varía la relación Inspiración : Espiración . Rango según lo indicado en el documento de conceptos.
Nota: No es esencial que esto sea configurable, se puede seleccionar un valor mayor que 1: 1 y la entrada se puede reutilizar como un umbral para la sobrepresión. (Varios médicos han indicado que variar I:/E no es crítico).
Palanca o Joystick con botón selección: esta palanca nos ayuda a seleccionar parámetros en la pantalla moviendolo, y seleccionando la opción mediante la presión del mismo. Este se utiliza para moverse entre pantallas o gráficas, indicadores, y bajar o subir opciones mostradas. Apretar el boton mientras movemos la palanca nos lleva al menú principal en cualquier momento.
Nota: Si aparece un alarma, esta se puede revisar y corregir, y se tiene que presionar el botón de la palanca para atender la alarma y apagarla.
Interruptor Trasero: Encendido / Apagado
Run/Stop: desactiva el sistema del motor instantáneamente. Este puede ser el interruptor de alimentación principal, pero una sola pulsación debe desactivar completamente el sistema. Esto permitirá retirar la bolsa y convertirla inmediatamente en una bolsa manual en caso de una falla importante.
Salidas
Pantalla de OLED: En esta pantalla se muestran todos los valores medidos, gráficas, menús de selección y alarmas.
Bocina, Buzzer o Zumbador: El zumbador de alerta audible identificará múltiples condiciones de falla, o movimientos entre pantalla y selección de opciones.
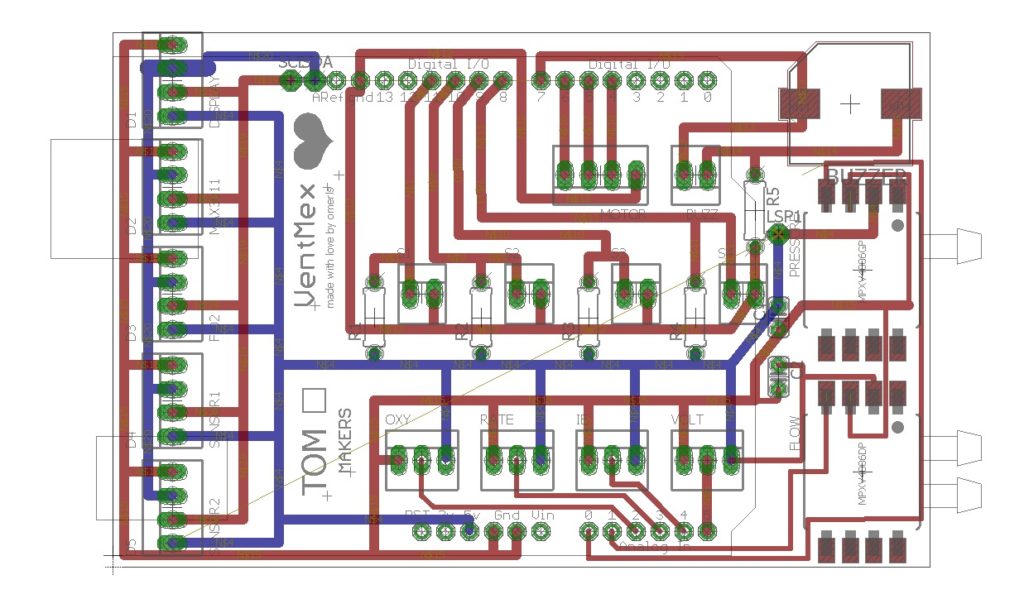
Diagrama Electrónico
A continuación se muestra el diagrama electrónico de nuestro ventilador de emergencia VentMex. Las conexiones se diseñaron sobre una PCB llamada VentMex Shield antes mencionada, y sirve para el Ardunio Mega 2560 v3, o inclusive para otras tarjetas Arduino.
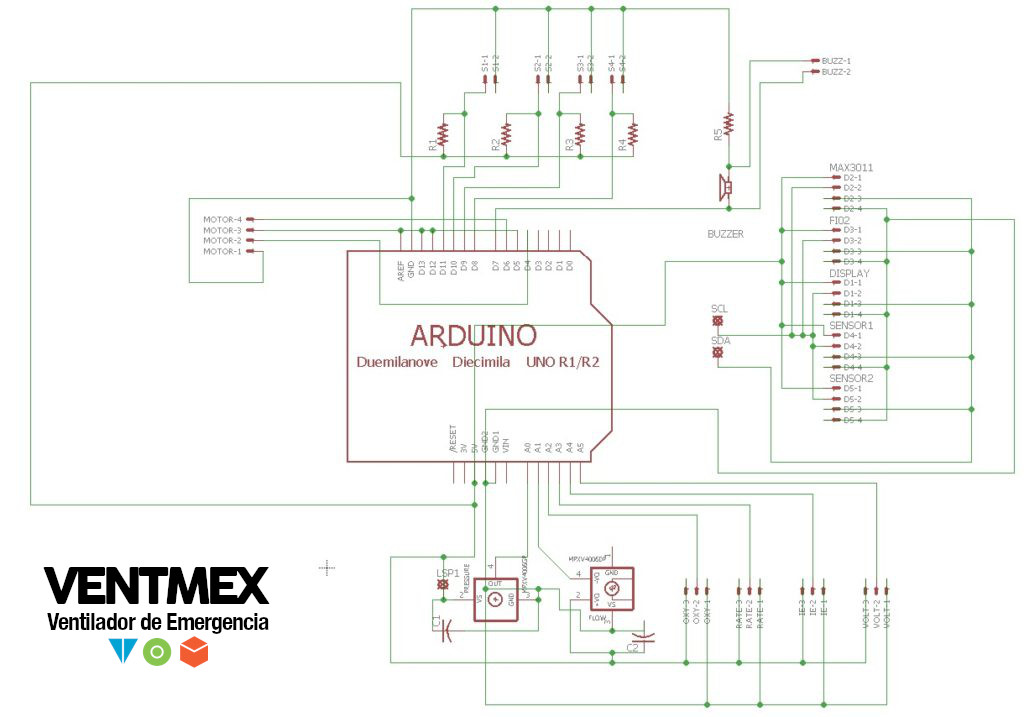
La lista de materiales o Bill of Materials Electrónicos (BOM), así como el diseño de VentMex Shield, se encuentra en la sección de archivos para decargar.